 |
|
|||||
 |
▽i-Constructionの推進に向けた基準類の策定 国土交通省HP
http://www.mlit.go.jp/report/press/kanbo08_hh_000405.html
一年前に発表されたICT土工に関する15の基準類のうち7つが改訂されました。また、小規模工事へのICT土工拡大のための12の基準が新設・改訂されました。いずれも、ICT土工のさらな る活用と生産性向上を図る観点で改訂がなされています。
そこで、今回のコラムでは、「UAVを用いた公共測量マニュアル(案)」「空中写真測量 (無人航空機)を用いた出来形管理要領(土工編)(案)」の二つの基準について、主な改 訂ポイントを紹介します。
ICT土工基準類の改訂について(国土交通省資料より抜粋)
| 口 | ICT活用工事での実践を踏まえた課題へ対応するため、平成28年3月に公表した 15の基準類のうち7の技術基準類と積算要領を改訂 |
| 名称 | 改訂新設 | 本文参照先・概要 | |
| 測量 調査 設計 |
UAVを用いた公共測量マニュアル(案) | 改訂 |
http://psgsv2.gsi.go.jp/koukyou/public/uav/index.html ・ラップ率の規定の緩和 ・標定点の設置・計測ルールの緩和、明確化 |
| 3次元設計データ交換標準(同運用ガイドラインを含む) | 改訂 |
http://www.nilim.go.jp/lab/qbg/bunya/cals/des.html ・ICT土工の実施を通じて得られた知見の反映及びICT舗装工に適用させるための修正 |
|
| 施工 | ICTの全面的な活用の実施方針 | 改訂 |
http://www.mlit.go.jp/sogoseisaku/constplan/sosei_constplan_tk_000031.html ・ICT舗装工やCIM等工種拡大に伴う改訂 |
| 土木工事施工管理基準(案) (出来形管理基準及び規格値) |
改訂 |
http://www.mlit.go.jp/tec/sekisan/sekou.html ・新たに追加した3次元計測機器の出来形管理要領名称(TS、TS(ノンプリズム方式)、 RTK-GNSS、無人航空機搭載型レーザースキャナー)の追記 |
|
| 写真管理基準(案) | 改訂 |
http://www.mlit.go.jp/tec/sekisan/sekou.html ・新たに追加した3次元計測機器の出来形管理要領名称(TS、TS(ノンプリズム方式)、 RTK-GNSS、無人航空機搭載型レーザースキャナー)の追記 |
|
| 空中写真測量(無人航空機)を用いた出来形管理要領 (土工編)(案) |
改訂 |
http://www.mlit.go.jp/sogoseisaku/constplan/sosei_constplan_tk_000031.html ・ラップ率の規定の緩和 ・標定点の設置・計測ルールの緩和 |
|
| 検査 | 空中写真測量(無人航空機)を用いた出来形管理の監 督・検査要領(土工編)(案) |
改訂 |
http://www.mlit.go.jp/sogoseisaku/constplan/sosei_constplan_tk_000031.html ・空中写真測量(無人航空機)を用いた出来形管理要領(土工編)(案)をふまえた修正 |
| 積算 基準 |
ICT活用工事(土工)積算要領 | 改訂 |
http://www.mlit.go.jp/sogoseisaku/constplan/sosei_constplan_tk_000031.html ・施エパッケージ積算対応 |
| 口 | 小規模工事への適用拡大や、さらなる効率化をもたらす新技術を活用するため に12の技術基準類を新設・改訂 |
| 名称 | 改訂新設 | 本文参照先・概要 | |
| 測量 調査 設計 |
地上レーザースキャナーを用いた公共測量マニュアル(案) | 新設 |
http://psgsv2.gsi.go.jp/koukyou/public/tls/index.html ・地上型レーザースキャナーによる公共測量に対応 |
| ステレオ写真測量(地上移動体)による土工の出来高算 出要領(案) |
新設 |
http://www.mlit.go.jp/sogoseisaku/constplan/sosei_constplan_tk_000031.html ・出来高部分払い時の簡易数量算出方法として、自己位置が計測されている状況でのステレオ写真測量を追加 |
|
| 施工 | TSを用いた出来形管理要領(土工編) | 改訂 |
http://www.mlit.go.jp/sogoseisaku/constplan/sosei_constplan_tk_000031.html ・既存の情報化施工用に策定済の要領に対して面管理の規定を追加しICT活用工事に利用可 能とするもの ・特定位置の測定が可能である―方で、多点観測が非効率であることから、点密度の規定を レーザースキャナー等と比べて緩和 |
| TS(ノンプリズム方式)を用いた出来形管理要領(土工編) | 新設 |
http://www.mlit.go.jp/sogoseisaku/constplan/sosei_constplan_tk_000031.html ・レーザースキャナー同等として扱い得るTSのノンプリズム機能をICT活用工事に利用可能とするもの ・特定位置の測定が可能である―方で、多点観測が非効率であることから、点密度の規定を レーザースキャナー等と比べて緩和 |
|
| RTK-GNSSを用いた出来形管理要領(土工編) | 新設 |
http://www.mlit.go.jp/sogoseisaku/constplan/sosei_constplan_tk_000031.html ・TS出来形管理要領(改訂後)同様にICT活用工事(面管理)利用可能とするもの ・特定位置の測定が可能である―方で、多点観測が非効率であることから、点密度の規定を レーザースキャナー等と比べて緩和 |
|
| 無人航空機搭載型レーザースキャナーを用いた出来形 管理要領(土工編) |
新設 |
http://www.mlit.go.jp/sogoseisaku/constplan/sosei_constplan_tk_000031.html ・無人航空機によるレーザースキャナー測量に対応 |
|
| TS・GNSSを用いた盛土の締固め管理要領 | 改訂 |
http://www.mlit.go.jp/sogoseisaku/constplan/sosei_constplan_tk_000031.html ・締固め層厚の把握の代わりに写真管理基準の緩和 |
|
| 検査 | TSを用いた出来形管理の監督検査要領(土工編) | 改訂 |
http://www.mlit.go.jp/sogoseisaku/constplan/sosei_constplan_tk_000031.html ・TSを用いた出来形管理要領(土工編)をふまえた修正 |
| TS(ノンプリズム方式)を用いた出来形管理の監督検査要領(土工編) | 新設 |
http://www.mlit.go.jp/sogoseisaku/constplan/sosei_constplan_tk_000031.html ・TS(ノンプリズム方式)を用いた出来形管理要領(土工編)をふまえた修正 |
|
| RTK-GNSSを用いた出来形管理の監督検査要領(土工編) | 新設 |
http://www.mlit.go.jp/sogoseisaku/constplan/sosei_constplan_tk_000031.html ・RTK-GNSSを用いた出来形管理要領(土工編)ふまえた修正 |
|
| 無人航空機搭載型レーザースキャナーを用いた出来形 管理の監督・検査要領(土工編) |
新設 |
http://www.mlit.go.jp/sogoseisaku/constplan/sosei_constplan_tk_000031.html ・無人航空機搭載型レーザースキャナーを用いた出来型管理要領(土工編)(案) に合わせて策定 |
|
| TS・GNSSを用いた盛土の締固め監督検査要領 | 改訂 |
http://www.mlit.go.jp/sogoseisaku/constplan/sosei_constplan_tk_000031.html ・無人航空機搭載型レーザースキャナーを用いた出来型管理要領(土工編)(案) に合わせて策定 |
|
| 口 | 測量成果のデータの3次元情報を高度化するため以下の2の技術基準類を新設する。 |
| 名称 | 改訂新設 | 本文参照先・概要 | |
| 測量 調査 設計 |
設計用数値地形図データ(標準図式)作成仕様【道路編】(案) | 新設 |
http://www.nilim.go.jp/lab/qbg/bunya/cals/cim.html 3次元地形データ作成業務の成果仕様を規定 |
| 設計用数値地形図データ(標準図式)作成仕様の電子納品運用ガイドライン(案) | 新設 |
http://www.nilim.go.jp/lab/qbg/bunya/cals/cim.html 3次元地形データ作成業務の電子成果品の運用に関する補足 |
|
(1)「UAVを用いた公共測量マニュアル(案)」 平成29年3月改正 国土地理院
▽UAVによる公共測量−国土地理院HP
http://psgsv2.gsi.go.jp/koukyou/public/uav/
「UAVを用いた公共測量マニュアル(案)」は、UAVで撮影した空中写真を用いて公共測量を行う際の技術的指針等を示した作業マニュアルです。
制定から1年が経過し、実際の利用も進んだ 結果、様々な質問や意見が国土地理院に寄せられたことから、内容の明確化、精度の向上、条件の緩和を目指してマニュアル改正を行うに至ったようです。
実際、今回の改正案は、非常にわかりやすくかつコンパクトにまとめられていると感じました。
ここでは、ICT土工においても参照される『UAVを用いた空中写真による三次元点群測量(以下、UAV三次元点群測量)』の改正ポイントを整理します。
”UAV三次元点群測量”における主な改正なポイント
[1]作業フロー
[2]空中写真のラップ率
[3]標定点及び検証点の配置
[4]標定点及び検証点の観測方法
[5]カメラキャリブレーション
[6]精度管理表
[1]作業フロー
基本的な作業の流れに変更はないものの、用語が改正されました。
改正後

【国土地理院 UAVを用いた公共測量マニュアル(案)、H29.3、p2より】

【国土地理院 UAVを用いた公共測量マニュアル(案)、H28.3、p3より】
[2]空中写真のラップ率
同一コース内の隣接空中写真との重複度(OL率)が80%以上に緩和されました。 ただし、撮影後の写真重複度が確認できる場合のみ適用できます。 撮影後の写真重複度の確認が艱難な場合には、従来どおり、OL率90%以上で撮影計画を立案する必要があります。
また、OL率を90%以上で計画すれば、写真重複度の点検は省略できるとも明記されました。 撮影後の写真重複度を、それぞれの写真毎に対置高度を考慮した上で自動算出できるソフトウエアが普及していない現状を踏まえた内容となっています。
筆者は、PhotoSCANを使用しております。 そのため、撮影後に写真毎に重複度を自動で点検できないことで苦労してました。 飛行時間や撮影枚数に支障がなければ、OL率90%以上で計画し、重複度点検を省略するのが現実的だと感じています。
改正後

【国土地理院 UAVを用いた公共測量マニュアル(案)、H29.3、p26より】

【国土地理院 UAVを用いた公共測量マニュアル(案)、H28.3、p41より】
外部標定点については、計測対象範囲の外側に配置することを標準とすると明記されました。 検証点のうち、外部検証点は廃止し、検証点の総数を標定点の半数以上を標準とするよう、改められました。 なお、標定点の配点間隔は、従来と変わっていません。
外部標定点を計測範囲の外側に配置するという基準は、ICT土工の空中写真測量(無人航空機)を用いた出来形管理要領(土工編)(案)との整合が図られたものと思われます。 検証点の配置基 準については、当マニュアルと出来形管理要領で異なる点に注意が必要です。
改正後
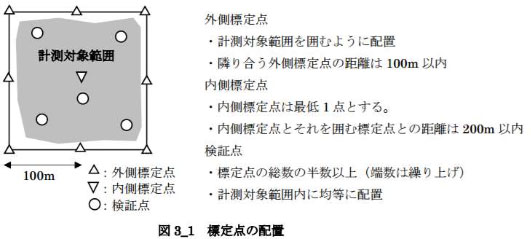
【国土地理院 UAVを用いた公共測量マニュアル(案)、H29.3、p24より】

【国土地理院 UAVを用いた公共測量マニュアル(案)、H28.3、p37より】
作業方法が明確化されました。
三次元点群の位置精度が0.05m以内の場合、具体的には出来形管理に適用する場合には、 TS(トータルステーション)を用いた測量のみが認められます。 一方、位置精度が0.1m、0.2m以内の場合、具体的には起工測量や部分出来高計測に適用する場合には、GNSSによるキネマティック法、RTK法、ネットワーク型RTK法も適用可能です。
作業方法がわかりやすく記載されるとともに、ICT土工の空中写真測量(無人航空機)を用いた出来形管理要領(土工編)(案)との整合が図られました。
[5]カメラキャリブレーション
セルフキャリブレーションを標準とし、独立したカメラキャリブレーションは必ずしも求めない形となりました。
PhotoSCAN等の三次元形状復元計算ソフトウエアを用いる場合、セルフキャリブレーションとした方が精度が良いことから、改正されたものと思われます。
[6]精度管理表
精度管理表の標準様式が改正されました。 三次元点群作成と数値地形図作成、それぞれの作業にあった様式となりました。 一例として、UAV撮影コース別精度管理表は下記のように改正されました。
| 改正後 | 改正前 |
 |
 |
(2) 「空中写真測量(無人航空機)を用いた出来形管理要領(土工編)(案)」
平成29年3月 国土交通省
▽ICTの全面的な活用−国土交通省HP
http://www.mlit.go.jp/sogoseisaku/constplan/sosei_constplan_tk_000031.html
「空中写真測量(無人航空機)を用いた出来形管理要領(土工編)(案)」は、ICT土工においてUAVによる出来形計測および出来形管理の方法を規定した要領です。
「UAVを用いた公共測量 マニュアル(案)」の改正と同様に、写真ラップ率の緩和および標定点計測方法の緩和により、より効率化が図れる改訂となっています。
その他、国総研Q&Aで対応した運用事項を反映した改訂がなされました。
特に、起工測量、部分出来高計測における標定点設置において、GNSSローバーが使用可能となったことで、効率化が進むことが期待されます。
ネットワーク型RTK-GNSS方式のGNSSローバーでは、基地局の設置が不要であり、測定者1名だけでの単点観測が可能になります。

【国土交通省HP ICT導入会議第4回 参考資料より抜粋】
今回のICT土工基準類の追加により、UAVに搭載したレーザースキャナーを用いた出来形管理が可能となりました。
無人航空機搭載型レーザースキャナーを用いた出来形管理要領(土工編)
今後普及が期待される、UAVに搭載したレーザースキャナーによる出来形管理について規定されました。 写真測量の弱点とされる、草木がある場合でも、地表面の計測が可能となります。 また、地上形レーザースキャナーの弱点とされる障害物背面の影部分の欠損や密度不足が解消されます。 機器価格が高いという課題はあるものの、今後の利用拡大が期待されます。

【国土交通省HP ICT導入会議第4回 参考資料より抜粋】